<html><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --><body><!-- [et_pb_line_break_holder] -->The George Washington University is currently working on its first CubeSat. The CubeSat will be a 3 U CubeSat and has been selected as part of NASA’s CubeSat Launch Initiative (CSLI) program.<!-- [et_pb_line_break_holder] --></body><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --></html>
<html><!-- [et_pb_line_break_holder] --><body><!-- [et_pb_line_break_holder] --><br><!-- [et_pb_line_break_holder] --></body><!-- [et_pb_line_break_holder] --></html>

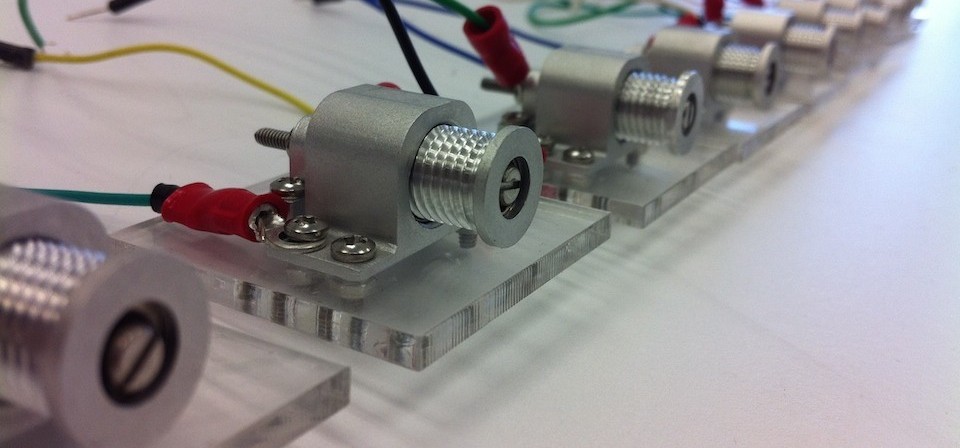
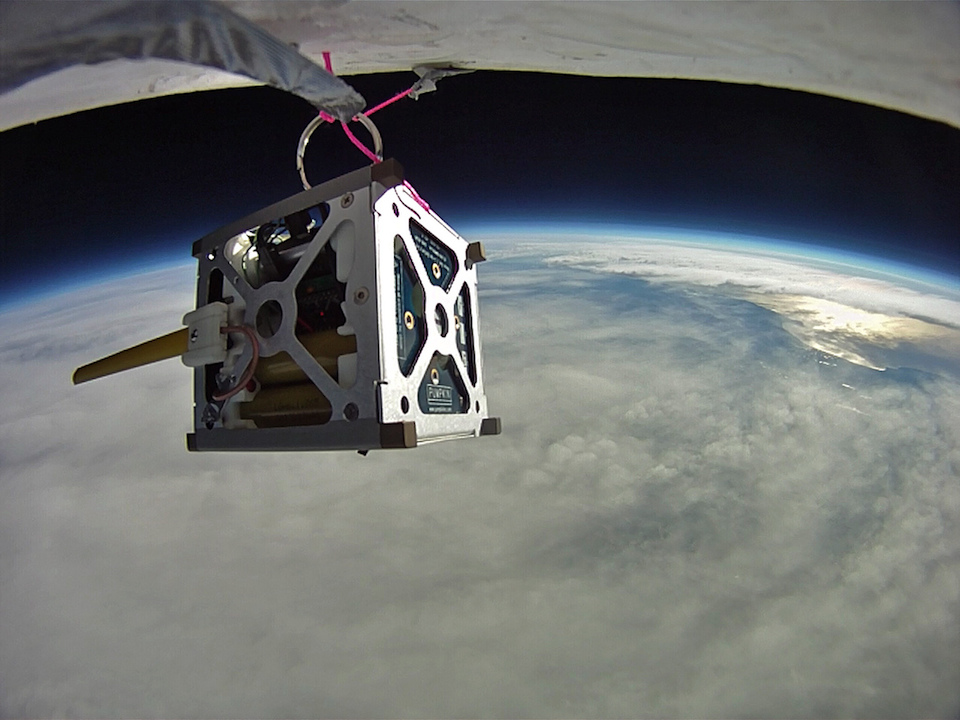
<html><!-- [et_pb_line_break_holder] --><body><!-- [et_pb_line_break_holder] -->Thusters<!-- [et_pb_line_break_holder] --><br><br><br><br><br><!-- [et_pb_line_break_holder] -->CubeSat Model<!-- [et_pb_line_break_holder] --></body><!-- [et_pb_line_break_holder] --></html>
<html><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --><body><!-- [et_pb_line_break_holder] --><b>Primary Goals</b><!-- [et_pb_line_break_holder] --><br><br><!-- [et_pb_line_break_holder] -->GW’s CubeSat team currently has over 35 students from various schools and departments, such as the mechanical and aerospace engineering, computer science, electrical engineering, physics, law school, business school, and systems engineering. The team consists of a mixture between undergraduate, PhD, and master's students, with the main goal of this mission being to provide them with hands-on experience on an aerospace project.<!-- [et_pb_line_break_holder] --><br><br><!-- [et_pb_line_break_holder] -->This 3U CubeSat’s primary mission is to demonstrate a propulsive 3-axis-stabilization system with electric propulsion based on GW’s Micro-Cathode Arc Thruster (µCAT) thruster. GW-Sat will have twelve of these thrusters located at the bottom of the CubeSat for attitude control and for propulsive maneuvers, such as drag compensation and changes to the orbital parameters. The propulsion system will have the capability of controlling the CubeSat’s attitude in all three axes, which is a capability that has not been fully demonstrated yet. <!-- [et_pb_line_break_holder] --></body><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --></html>

<html><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --><body><!-- [et_pb_line_break_holder] --><b>Secondary Goals</b><!-- [et_pb_line_break_holder] --><br><br><!-- [et_pb_line_break_holder] -->The CubeSat will perform three secondary missions. The first science mission will consist of a store-forward transmission architecture, which will receive data from a remote ground station (RGS) in one of Costa Rica’s wetlands. GW will partner with the TEC University in Costa Rica for this mission, and the goal is to receive data packages from the RGS, which will be later downloaded at GW’s or USNA’s ground station and forwarded to TEC. The information collected at the RGS contains information about the wetland’s health, such as water and air temperatures, water levels, water acidity, CO2 concentrations, amongst other variables. This information will be used to study the wetland over an extended period of time with the help of the autonomous RGS. <!-- [et_pb_line_break_holder] --><br><br><!-- [et_pb_line_break_holder] -->The second mission will test the effects of the µCAT on radio communications from and to the satellite by firing a certain amount of times during the transmission of a predefined data package to see if the plasma generated by the thrusters affects the quality of the transmission.<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --></body><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --></html>
<html><!-- [et_pb_line_break_holder] --><body><!-- [et_pb_line_break_holder] --><br><!-- [et_pb_line_break_holder] --></body><!-- [et_pb_line_break_holder] --></html>
<html><!-- [et_pb_line_break_holder] --><body><!-- [et_pb_line_break_holder] -->The third mission consists of a technology demonstration for Tetra, a star identification algorithm, which was developed by two students of the Massachusetts Institute of Technology (MIT). Tetra will power GW-CubeSat’s Star-Tracker, a fundamental sensor to meet the high accuracy requirements of the satellite’s Attitude and Determination Control System (ADCS). Tetra requires much less computational time than early star identifications algorithms, this allows to build low budget Star-Trackers based on cheap hardware, as is the case of GW-CubeSat’s Star-Tracker based on a Raspberry Pi Zero, and an 8 Megapixel Camera Module. Tetra is open source, and, to the best of our knowledge, this will be the first time that to be used for a space mission. <!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --></body><!-- [et_pb_line_break_holder] --></html>
<html><!-- [et_pb_line_break_holder] --><body><!-- [et_pb_line_break_holder] -->The mission is currently planned for a launch in late 2019. The team has passed PDR and is headed towards CDR, currently planned for the middle of May. <!-- [et_pb_line_break_holder] --></body><!-- [et_pb_line_break_holder] --></html>